
变换和观察 #
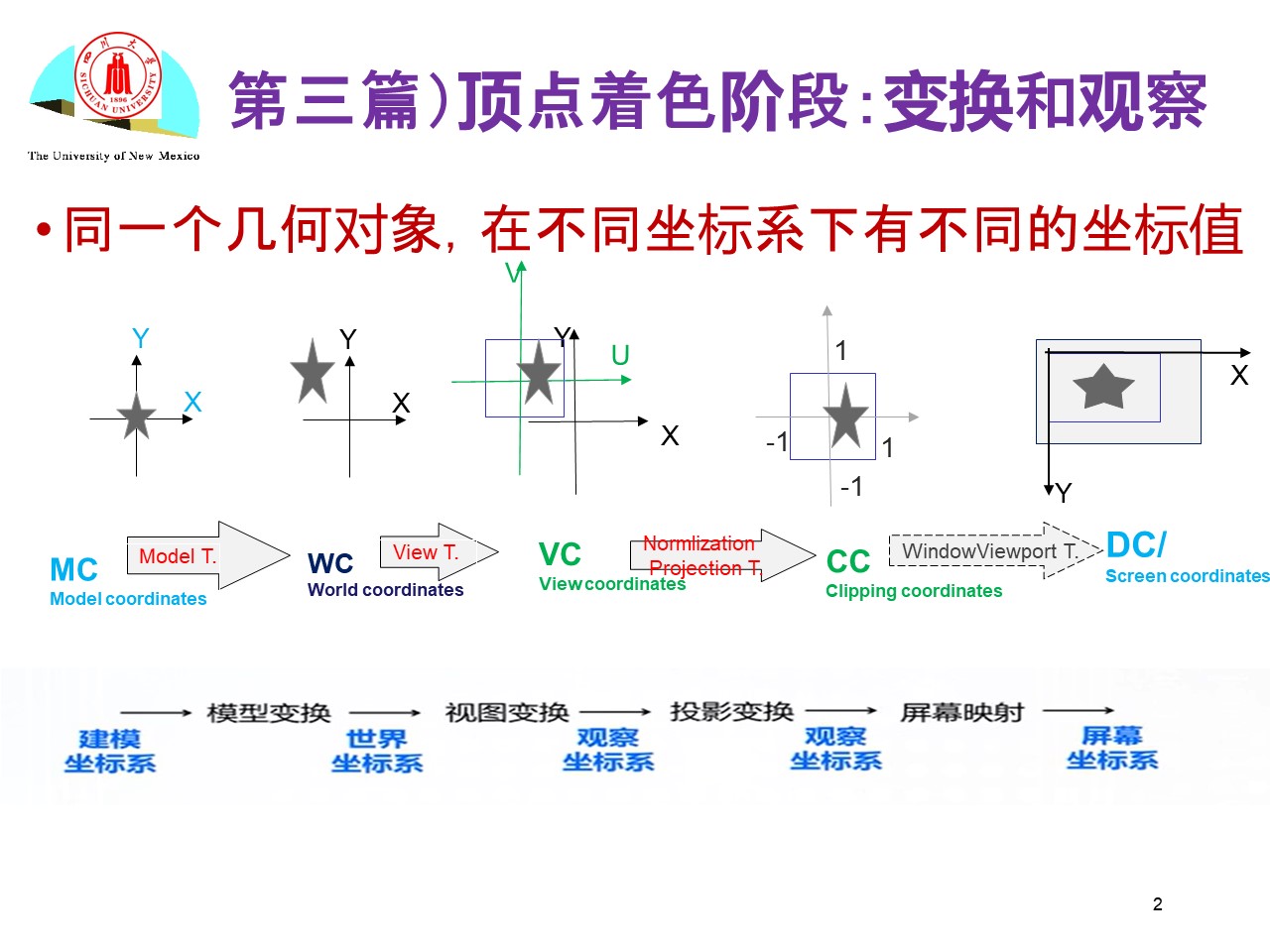
坐标体系 #
针对一组基向量,线性表出空间中的一个位置元素,例如: $v=2v_1+3v_2-4v_3$
即
$v=[2,3,-4]^T$(通常使用列向量的表示)
变换坐标系: 对于一对基向量:
$[u_1,u_2,u_3]=M^T[v_1,v_2,v_3]$
则在v坐标系下的向量$α$在u下是$β=M^Tα$
标架(frame)表示 #
在仿射空间中,通过基向量+原点形成~
何为齐次坐标?
齐次坐标:给普通的向量空间增加一个元素,用于区分表达向量表示的是一个方向还是一点
四维齐次坐标:
$v=[α_1,α_2,α_3,0],p=[β_1,β_2,β_3,1]$
优点:使得所有基本变换可以通过变换矩阵描述
思想:把n维集合问题变换到n+1维
形式上:用n+1维向量表示n维向量
$笛卡尔坐标(x,y)→齐次坐标(xh,yh,h),(h≠0,规格化齐次坐标下h=1)$
Frame的变换
假设两个frame:$P(P_0,v_1,v_2,v_3), Q(Q_0,u_1,u_2,u_3)$
对应一个4x4变换矩阵$M$:
$$ \left( \begin{matrix} γ_{11}&γ_{12}&γ_{13}&0\\ γ_{21}&γ_{22}&γ_{23}&0\\ γ_{31}&γ_{32}&γ_{33}&0\\ γ_{41}&γ_{42}&γ_{43}&1\\ \end{matrix} \right) $$(自由度只有12个)
标准变换 #
何为变换:
映射点/向量到别的点/向量
-
旋转(刚性)
- $$ R_z(θ)=\left( \begin{matrix} cosθ&-sinθ&0&0\\ sinθ&cosθ&0&0\\ 0&0&1&0\\ 0&0&0&1\\ \end{matrix} \right) $$
- $$ R_x(θ)=\left( \begin{matrix} 1&0&0&0\\ 0&cosθ&-sinθ&0\\ 0&sinθ&cosθ&0\\ 0&0&0&1\\ \end{matrix} \right) $$
- $$ R_y(θ)=\left( \begin{matrix} cosθ&0&sinθ&0\\ 0&1&0&0\\ -sinθ&0&cosθ&0\\ 0&0&0&1\\ \end{matrix} \right) $$
-
$$
-
平移(刚性)
-
$P'=P+d$
-
齐次坐标:$P=TP$
- $$ T=\left( \begin{matrix} 1&0&0&d_x\\ 0&1&0&d_y\\ 0&0&1&d_z\\ 0&0&0&1\\ \end{matrix} \right) $$
-
-
缩放
- $$ S=\left( \begin{matrix} s_x&0&0&0\\ 0&s_y&0&0\\ 0&0&s_z&0\\ 0&0&0&1\\ \end{matrix} \right) $$
-
镜像
- 缩放符号变号
-
斜切
- $略$
串联变换 #
$M=M_1M_2M_3...$
$P'=M_n...M_2M_1P_0$,其中$M_n$被称为CTM
只需要按正确的变换步骤累乘变换矩阵得到串联矩阵$M$,不断作用于初始$P_0$即可
基于列向量,需要左乘
逆变换 #
平移 easy
旋转矩阵是正交矩阵
缩放 倒数
绕任意方向的旋转
先把方向绕到z轴,再绕z旋转,再把方向绕回来
应用变换 #
实例变换/模型变换
-
M=TRS
-
S FOR SCALE
-
R FOR ORIENT
-
T FOR LOCATE
-